Yufei Duan
We should always explore things that we are a little afraid of. --Andrea Ghez

Hello! I’m Yufei, a WASP-affiliated Ph.D. student in Division of Robotics, Perception and Learning at KTH Royal Institute of Technology supervised by Prof. Danica Kragic. My research focuses on leveraging the strengths of control and planning to provide robots with a robust foundation for learning — helping them understand their environment, make informed decisions, and adapt in real time.
Prior to KTH, I obtained my Master degree at ETH Zurich and Bachelor degree with First Class Honours at the Hong Kong Polytechnic University. During my master’s study, I worked on path planning for fixed-wing UAVs at Autonomous Systems Lab led by Prof. Roland Siegwart and whole-body motion planning for center-articulated robot at Robotics Systems Lab led by Prof. Marco Hutter.
Feel free to reach out if you’re interested in my work or would like to collaborate!
news
| Jul 30, 2025 | I am delighted to share that our work, Real-Time Iteration Scheme for Diffusion Policy has been accepted to IROS, Hangzhou. |
|---|---|
| Oct 16, 2024 | I am delighted to present our work, Energy-Optimized Planning in Non-Uniform Wind Fields with Fixed-Wing Aerial Vehicles at IROS, Abu Dhabi. |
| Feb 15, 2024 | I started my PhD study at KTH Royal Institute of Technology supervised by Prof. Danica Kragic |
| Oct 31, 2023 | I finished my master’s study at ETH Zurich. |
| Sep 14, 2020 | I started my master’s degree in mechanical engineering at ETH Zurich. |
selected publications
-
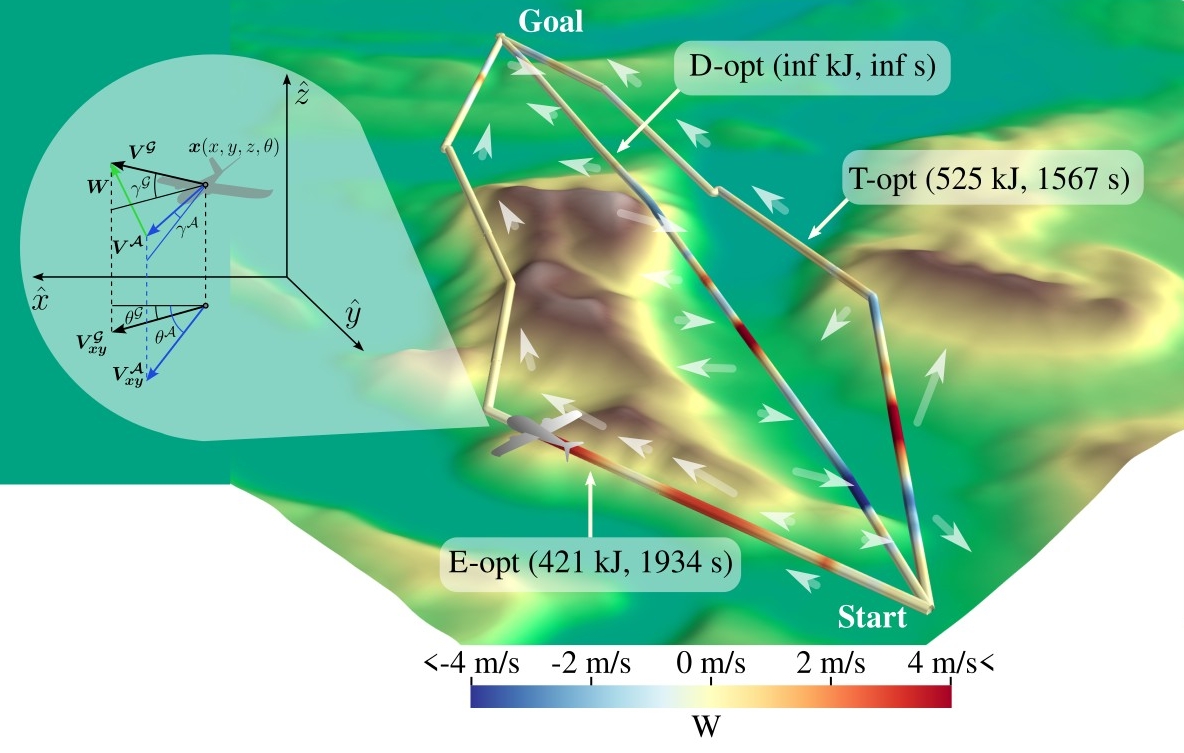 Energy-Optimized Planning in Non-Uniform Wind Fields with Fixed-Wing Aerial Vehicles2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Energy-Optimized Planning in Non-Uniform Wind Fields with Fixed-Wing Aerial Vehicles2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024

